Hi,
I am using an old version, but maybe you can still help me. I am using the ROS operating system, and there, the unpack_from function is used for reading values from bags.
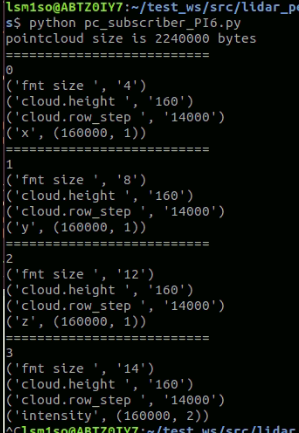
When I try to read uint16 with the function pointcloud2.readpoint(), it returns 2 values instead of 1, and I couldn t understand why. Since this readpoint() is from the official pointcloud2 package from ros, and unpack_from is from official struct package, I don t think I could do many error here. In the screenshot, you can see that the inputs parameters seems ok. I am reading a field from my bag which is 2 bytes, and the offset (12) make also sense (4th value after 3 floats).
def read_points(cloud, field_names=None):
"""
Read points from a L{sensor_msgs.PointCloud2} message.
@param cloud: The point cloud to read from.
@type cloud: L{sensor_msgs.PointCloud2}
@param field_names: The names of fields to read. If None, read all fields. [default: None]
@type field_names: iterable
@param skip_nans: If True, then don't return any point with a NaN value.
@type skip_nans: bool [default: False]
@param uvs: If specified, then only return the points at the given coordinates. [default: empty list]
@type uvs: iterable
@return: Generator which yields a list of values for each point.
@rtype: generator
"""
assert isinstance(cloud, roslib.message.Message) and cloud._type == 'sensor_msgs/PointCloud2', 'cloud is not a sensor_msgs.msg.PointCloud2'
fmt = _get_struct_fmt(cloud.is_bigendian, cloud.fields, field_names)
print('fmt size ' , str(struct.calcsize(fmt)))
print('cloud.height ' , str(cloud.height))
print('cloud.row_step ' , str(cloud.row_step))
width, height, point_step, row_step, data, isnan = cloud.width, cloud.height, cloud.point_step, cloud.row_step, cloud.data, math.isnan
unpack_from = struct.Struct(fmt).unpack_from
for v in range(height):
offset = row_step * v
for u in range(width):
yield unpack_from(data, offset)
offset += point_step
def callback(data):
print("pointcloud size is %d bytes" % len(data.data))
pointCloudArray_a = [1,2,3,4,5]
#print((data.data.size))
for indoux in range(4):
print("==========================")
print(indoux)
pointCloudArray_a[indoux] = np.array(list((read_points2(data, field_names=(fields_PI6[indoux])))))
Here my mail again if you need more infos:
sebaleme@gmail.com
thanks,
|

{kind=link}